Deo zbornika Teorija razvoja igara
Matrica rotacije
Matrica rotacije služi za okretanje predmeta ili celokupnog prostora oko određene tačke ili ose. Podrazumevano, matrica rotacije rotira objekat u odnosu na ishodište.
U dve dimenzije postoji samo jedna moguća osa rotacije, pa nam je potreban samo ugao. U 3D je dosta složenije: postoje tri primarne ose rotacije, a telo može rotirati i oko bilo koje proizvoljne ose.
2D rotacija
2D rotacija oko ishodišta u smeru kazaljke:
cos(θ), -sin(θ)
sin(θ), cos(θ)
2D rotacija oko ishodišta u smeru suprotnom od kazaljke:
cos(θ) sin(θ)
-sin(θ) cos(θ)
Posebni slučajevi
Obzirom da je cos(90) = 0, a sin(90) = 1, postoje posebne rotacije koje samo obrću unete vrednosti:
rotacija 90° = (x, y) => (-y, x)
rotacija 180° = (x, y) => (-x, -y)
rotacija 270° = (x, y) => (y, -x)
Objašnjenje: Kada zamenimo vrednosti sin i cos u matrici rotacije dobijemo:
R(90°) = 0, -1
1, 0
Množenje ove matrice sa (x, y) daje (-y, x).
3D rotacija
Rotacija oko x ose za ugao θ:
1, 0, 0
0, cos(θ), -sin(θ)
0, sin(θ), cos(θ)
Rotacija oko y ose za ugao θ:
cos(θ), 0, sin(θ)
0, 1, 0
-sin(θ), 0, cos(θ)
Rotacija oko z ose za ugao θ:
cos(θ), -sin(θ), 0
sin(θ), cos(θ), 0
0, 0, 1
Homogeni zapis
Matrica rotacije oko x-ose:
1 0 0 0
0 cosθ -sinθ 0
0 sinθ cosθ 0
0 0 0 1
Matrica rotacije oko y-ose:
cosθ 0 sinθ 0
0 1 0 0
-sinθ 0 cosθ 0
0 0 0 1
Matrica rotacije oko z-ose:
cosθ -sinθ 0 0
sinθ cosθ 0 0
0 0 1 0
0 0 0 1
Primer: Tarzan

Recimo da igrač treba da se ljulja na lijani. Možemo primeniti rotaciju oko tačke gde je lijana pričvršćena. Dakle, treba izračunati ugao između igrača i centra rotacije, povećavati ga i sledstveno ažurirati poziciju igrača.
Ugao između igrača i centra rotacije računamo pomoću atan2(). Nakon što povećamo ugao, možemo izračunati nove x i y koordinate sa sin i cos:
ugao = atan2(y, x)
duzina = sqrt(x * x + y * y)
ugao += 1
nov_x = duzina * cos(ugao)
nov_y = duzina * sin(ugao)
Pošto konvertujemo iz kartezijanskih koordinata u polarne, i ponovo nazad, možemo izgubiti preciznost. Bolji način je matrica rotacija, koja omogućuje rotiranje bez međukoraka:
nov_x = x * cos(ugao) - y * sin(ugao)
nov_y = x * sin(ugao) + y * cos(ugao)
Optimizacija: razumno je unapred izračunati cos i sin, jer nam treba dvaput.
Primer: Svemirski brod
Recimo da pravimo igru Asteroidi, i imamo jednostavan 2D svemirski brod koji se može slobodno rotirati. Model broda izgleda ovako:
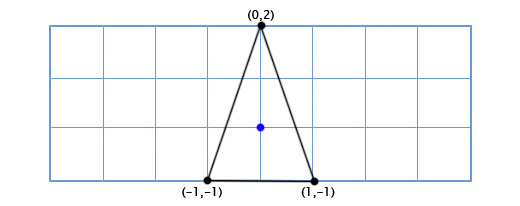
Kako crtati brod rotiran za proizvoljan ugao, na primer za 49 stepeni u smeru suprotnom od kazaljke? Pomoću trigonometrije možemo napraviti funkciju koja prima tačku i ugao, te vraća rotiranu tačku:
vec2 rotate(vec2 point, float angle){
vec2 rotated_point;
rotated_point.x = point.x * cos(angle) - point.y * sin(angle);
rotated_point.y = point.x * sin(angle) + point.y * cos(angle);
return rotated_point;
}
Primenom funkcije na tri tačke broda dobijamo sledeći oblik:
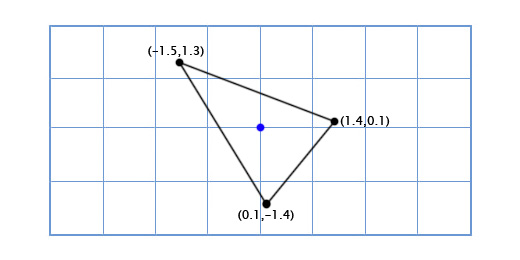
Operacije kosinusa i sinusa su prilično spore, ali smo ih radili samo na tri tačke. Međutim, sada odlučujemo da nadogradimo brod da izgleda ovako:
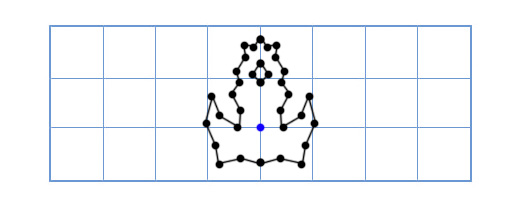
Sada je stara funkcija prespora! Elegantno rešenje bi bilo da umesto svake tačke ponaosob rotiramo samo x i y osu modela.
Objašnjenje: Pozicija (3,2) znači 3 * x osa plus 2 * y osa. Podrazumevano, x osa = (1,0), y osa = (0,1), pa dobijamo 3(1,0) + 2(0,1). Međutim, ako rotiramo ose, lako ćemo izračunati svaku tačku koja zavisi od njih.
rotiranje (1,0) za 49 stepeni = (0,66, 0,75) // nova x osa
rotiranje (0,1) za 49 stepeni = (-0,75, 0,66) // nova y osa
Za modifikovane ose (a,b) i (c,d), novu tačku (x,y) možemo naći pomoću ovog izraza:
x(a,b) + y(c,d)